
รู้ลึกเรื่องรถ
อีกหนึ่งก้าวของยานยนต์อนาคต
อุบัติเหตุที่เกิดขึ้นกับรถไฟฟ้า เทสลา เป็นเรื่องที่น่าตกใจ เพราะอุบัติเหตุที่เกิดกับรถยนต์ไร้คนขับจนมีผู้เสียชีวิตเป็นครั้งแรกของโลก แต่หลายๆ คนก็ไม่แปลกใจ รวมถึงผู้เขียนด้วย เพราะแม้ว่าระบบขับอัตโนมัติ หรือ โหมด ออโทไพลอท 7 (AUTOPILOT 7) ของ เทสลา จะดูน่าตื่นเต้น แต่เท่าที่เคยสัมผัสมา มันยังไม่สามารถวางใจได้เต็มที่ และมีกรณีชนเพราะระบบอัตโนมัติอยู่เนืองๆแม้ว่า เทสลา จะมีประวัติการวิ่งโดยรวมกันแล้วกว่า 130 ล้านไมล์ (มากกว่า 200 ล้านกิโลเมตร) โดยปราศจากอุบัติเหตุรุนแรง แต่การชนเมื่อวันที่ 7 พฤษภาคม 2559 ที่รัฐฟลอริดา ได้คร่าชีวิตของ โจชัว บราวน์ (JOSHUA BROWN) ผู้ซึ่งปล่อยให้ เทสลา โมเดล เอส ของเขาวิ่งในโหมดอัตโนมัติในวันท้องฟ้าสดใสแดดจ้าบนทางหลวง และรถได้พุ่งเสียบชนเข้าไปในใต้ท้องรถพ่วง 18 ล้อ ที่ปาดหน้ามาแบบ “มิดด้าม” และในเวลาต่อมาจากการวิเคราะห์สาเหตุการชน พบว่าอุบัติเหตุเกิดจากแสงแดดที่สะท้อนพื้นถนน ทำให้กล้องในตัวรถไม่สามารถจับเส้นสีขาวบนถนนได้ดีนัก และรถพ่วงคันที่โดนชนก็เป็นรถสีขาวด้วยเช่นกัน จากประสบการณ์ของผู้เขียนกับ เทสลา อาจจะสรุปได้ว่า ในบางสถานการณ์ระบบคอมพิวเตอร์พบว่าสถานการณ์ไม่สมบูรณ์ คลุมเครือ อาทิ มองไม่เห็นเส้นถนน จะมีการตัดการทำงานในแบบอัตโนมัติและให้ผู้ขับเข้ามาควบคุมรถแทน ช่วงนั้นอาจจะเป็นจังหวะที่ไม่ดีนัก รวมถึงการตัดสินใจเบรคไม่ทันท่วงที จึงทำให้เกิดอุบัติเหตุ อุบัติเหตุครั้งนี้จะ “หยุด” การเติบโตของการขับขี่แบบอัตโนมัติหรือ ? ผู้เขียนเชื่อว่า ไม่ และจะเร่งให้เกิดการพัฒนาต่อไปอย่างรวดเร็วเสียด้วย เห็นได้จากรถยนต์หลายรุ่นในปัจจุบันได้ทยอยติดตั้งระบบอัตโนมัติ “บางส่วน” เข้ามาในรถแล้ว อาทิ โวลโว รุ่นปัจจุบันติดตั้งกล้องที่สามารถอ่านป้ายสัญญาณจราจรบางชนิดออก อาทิ ป้ายบอกความเร็ว หรือป้ายทางด่วน แล้วจะแสดงให้ผู้ขับรับรู้ว่าในเขตนี้เราควรวิ่งที่ความเร็วเท่าใด รวมถึงระบบถอยจอดขนาน “กึ่งอัตโนมัติ” แต่ ฟอร์ด โฟคัส นำหน้าไปอีกขั้นด้วยระบบถอยจอด “เข้าซอง” อัตโนมัติ (แม้เท่าที่ลองมา ยังเชื่อถือไม่ได้ เพราะพาลจะพาไปเบียดรถคันอื่นอยู่ร่ำไป) หรือระบบเบรคอัตโนมัติที่มีติดตั้งในระดับอีโคคาร์ อย่าง มิตซูบิชิ มิราจ และแอททราจ ไปจนถึงระบบรักษาความเร็ว และระยะห่างกับรถคันหน้า (ACC: ADAPTIVE CRUISE CONTROL) รวมถึง การรักษาเลน และควบคุมพวงมาลัยอัตโนมัติ ซึ่งมีใน ฮอนดา แอคคอร์ด ไฮบริด รุ่นล่าสุดในบ้านเราแล้ว การพัฒนามีมาจากทุกมุมโลกอย่างต่อเนื่อง ดังจะเห็นได้จากค่าย แจกวาร์ แลนด์ โรเวอร์ ที่นอกจากจะตอบรับกับกระแสยานยนต์ไฟฟ้า ด้วยการร่วมมือกับ บีเอมดับเบิลยู และ ฟอร์ด สร้างและพัฒนาแบทเตอรีให้มีสมรรถนะทัดเทียมกับ เทสลา แล้ว พร้อมทั้งยังเดินหน้าพัฒนาเทคโนโลยีด้านระบบขับขี่อัตโนมัติ และระบบเพื่อช่วยผู้ขับขี่ในสถานการณ์ต่างๆ อีกด้วย
 แจกวาร์ แลนด์ โรเวอร์ ร่วมกับ ศูนย์นวัตกรรมยานยนต์แห่งชาติ หรือ NATIONAL AUTOMOTIVE INNOVATION CENTER (NAIC) ที่ตั้งอยู่ใน WARWICK UNIVERSITY ในสหราชอาณาจักร พยายามผลักดันเทคโนโลยี กึ่งไร้คนขับและไร้คนขับ ในรูปแบบต่างๆ กัน อาทิ เซนเซอร์ตรวจจับความสูงของทางเข้าอาคาร (OVERHEAD CLEARANCE ASSIST) หรือกิ่งไม้ข้างหน้า เพื่อให้รถที่สูง หรือรถที่แบกจักรยานไว้บนหลังคา ไม่ต้องเสี่ยงกับอุบัติเหตุจากความเผอเรอของตนเอง หรือเทคโนโลยีช่วยขับในถนนที่มีทางซ่อม (ROADWORD ASSIST) อันเป็นการขับโดยวิเคราะห์จากแนวกรวยบนถนน แบบ 3 มิติ ทั้งหมดนี้ยังคงเป็นเทคโนโลยีกึ่งอัตโนมัติ
แต่สิ่งสำคัญอีกสิ่งหนึ่งซึ่งได้รับการพัฒนา คือ เทคโนโลยีในการสื่อสารระหว่างยานพาหนะ (VEHICLE TO VEHICLE COMMUNICATION) หรือยานพาหนะกับสิ่งแวดล้อม (VEHICLE TO INFRASTRUCTURE) หรือที่เรียกว่า OVER THE HORIZON เป็นช่องทางสื่อสารระยะใกล้แบบไร้สายหรือที่เรียกว่า DSRC (DEDICATED SHORT RANGE COMMUNICATION) เพื่อที่จะได้รับรู้ถึงสถานการณ์ที่อยู่เบื้องหน้าได้อย่างทันท่วงที ขั้นตอนนี้แม้ยังห่างไกลจากการนำไปใช้ในการผลิตจริง เนื่องจากต้องการเงินทุนพัฒนาค่อนข้างสูง อาทิ ต้องพัฒนาป้ายสัญญาณรวมถึงไฟจราจรให้มีระบบสื่อสารข้อมูลออกไปยังรถยนต์ที่อยู่รอบๆ โดยรถยนต์ของเราจะรับรู้ได้แม้ยังไม่เห็นป้ายนั้น หรือเตือนว่ามีรถฉุกเฉิน เช่น รถพยาบาลกำลังขอทางมาจากด้านหลัง รถของเราก็จะหลบให้โดยอัตโนมัติ เป็นต้น ทั้งหมดนี้เป็นไปเพื่อความปลอดภัยของการขับขี่นั่นเอง
แจกวาร์ แลนด์ โรเวอร์ ร่วมกับ ศูนย์นวัตกรรมยานยนต์แห่งชาติ หรือ NATIONAL AUTOMOTIVE INNOVATION CENTER (NAIC) ที่ตั้งอยู่ใน WARWICK UNIVERSITY ในสหราชอาณาจักร พยายามผลักดันเทคโนโลยี กึ่งไร้คนขับและไร้คนขับ ในรูปแบบต่างๆ กัน อาทิ เซนเซอร์ตรวจจับความสูงของทางเข้าอาคาร (OVERHEAD CLEARANCE ASSIST) หรือกิ่งไม้ข้างหน้า เพื่อให้รถที่สูง หรือรถที่แบกจักรยานไว้บนหลังคา ไม่ต้องเสี่ยงกับอุบัติเหตุจากความเผอเรอของตนเอง หรือเทคโนโลยีช่วยขับในถนนที่มีทางซ่อม (ROADWORD ASSIST) อันเป็นการขับโดยวิเคราะห์จากแนวกรวยบนถนน แบบ 3 มิติ ทั้งหมดนี้ยังคงเป็นเทคโนโลยีกึ่งอัตโนมัติ
แต่สิ่งสำคัญอีกสิ่งหนึ่งซึ่งได้รับการพัฒนา คือ เทคโนโลยีในการสื่อสารระหว่างยานพาหนะ (VEHICLE TO VEHICLE COMMUNICATION) หรือยานพาหนะกับสิ่งแวดล้อม (VEHICLE TO INFRASTRUCTURE) หรือที่เรียกว่า OVER THE HORIZON เป็นช่องทางสื่อสารระยะใกล้แบบไร้สายหรือที่เรียกว่า DSRC (DEDICATED SHORT RANGE COMMUNICATION) เพื่อที่จะได้รับรู้ถึงสถานการณ์ที่อยู่เบื้องหน้าได้อย่างทันท่วงที ขั้นตอนนี้แม้ยังห่างไกลจากการนำไปใช้ในการผลิตจริง เนื่องจากต้องการเงินทุนพัฒนาค่อนข้างสูง อาทิ ต้องพัฒนาป้ายสัญญาณรวมถึงไฟจราจรให้มีระบบสื่อสารข้อมูลออกไปยังรถยนต์ที่อยู่รอบๆ โดยรถยนต์ของเราจะรับรู้ได้แม้ยังไม่เห็นป้ายนั้น หรือเตือนว่ามีรถฉุกเฉิน เช่น รถพยาบาลกำลังขอทางมาจากด้านหลัง รถของเราก็จะหลบให้โดยอัตโนมัติ เป็นต้น ทั้งหมดนี้เป็นไปเพื่อความปลอดภัยของการขับขี่นั่นเอง
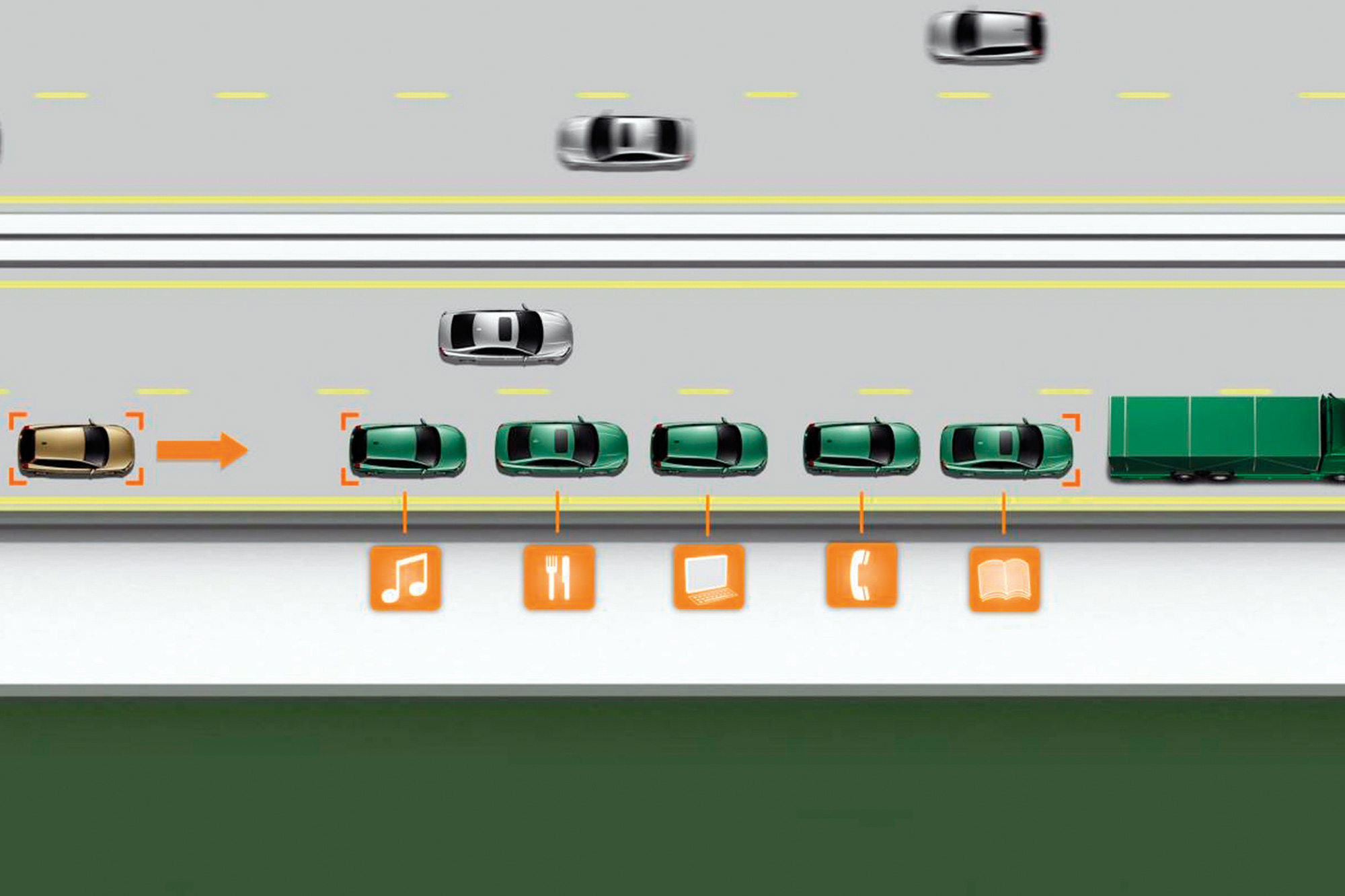 เทคโนโลยี DSRC ยังสามารถนำมาใช้เพื่อ “ร่น” ระยะเวลาการตัดสินใจของผู้ขับขี่ ขณะขับรถต่อกันเป็นขบวน ในรูปแบบของ COOPERATIVE-ADAPTIVE CRUISE CONTROL (CACC) หรือระบบครูสคอนทโรลแบบร่วมมือกัน โดยรถยนต์ซึ่งขับต่อกันเป็นขบวนในลักษณะคอนวอย (CONVOY) หรือ พลาทูนิง (PLATOONING) จะมีการสื่อสารไร้สายไปยังรถคันนำ รูปแบบการเคลื่อนที่ของรถคันที่นำจะส่งผลทันทีกับรถคันที่ตามในขบวน อาทิ เมื่อเบรคกะทันหัน รถคันต่อมาก็จะเบรคทันทีด้วยน้ำหนักเบรคที่เท่ากันในเวลาเพียงเสี้ยววินาที ซึ่งเมื่อเทียบกับเทคโนโลยีเซนเซอร์กล้อง หรือเรดาร์ในปัจจุบัน ที่มีการหน่วงเวลาเล็กน้อย ระบบ DSRC นี้จะทำงานได้เร็วกว่ามาก
ด้วยเทคโนโลยีนี้ รถยนต์ที่วิ่งตามกันบนทางหลวงจะสามารถวิ่งชิดเข้าหากันได้ใกล้มากขึ้น หากเทียบกับเทคโนโลยีปัจจุบันที่ใช้เรดาร์ จะต้องทิ้งห่างกับคันหน้าถึง 2-3 ช่วงคันรถ ซึ่งเป็นสาเหตุให้รถคันอื่น “แทรก” เข้ามาได้ง่าย ทำให้เกิดอันตรายได้ แม้เทคโนโลยีนี้จะทำให้รถวิ่งใกล้กันจนน่ากลัว แต่เชื่อเถอะ ว่า หลังจากที่ใช้ไปซักระยะหนึ่ง เราจะมั่นใจไปเองว่า มันทำงานได้เร็วกว่ามนุษย์อย่างแน่นอน
และที่เหนือไปกว่านั้น คือ การพัฒนาเทคโนโลยี DSRC ขับเคลื่อนอัตโนมัติสำหรับการวิ่งนอกเส้นทางถนน (OFF-ROAD) ในระบบนี้เราจะไม่มีสาธารณูปโภครอบตัวให้อ้างอิง ดังนั้นรถยนต์จะใช้การสื่อสารระหว่างรถกับรถด้วยกันเป็นหลัก
แนวคิดจะเหมือนกับการขับบนทางหลวง โดยรถที่วิ่งในขบวนจะทำทุกอย่างเหมือนกับรถคันนำหน้าในเวลาที่เหมาะสม ข้อมูลจากคันหน้าจะถูกส่งไปยังรถคันต่อๆ มา ไม่ว่าจะเป็น องศาของพวงมาลัย การใช้คันเร่ง การทำงานของระบบรองรับ รวมถึงลักษณะของการเบรค เพื่อที่จะได้ปรับตัวรถได้ทันท่วงทีกับสภาพพื้นดินข้างหน้า
และถึงจะไม่มีรถนำทาง แต่ แลนด์ โรเวอร์ ที่ติดตั้งระบบเซนเซอร์ทันสมัย ก็ยังสามารถวิเคราะห์สภาพถนนล่วงหน้าได้ หากเส้นทางด้านหน้าดูแล้วมีความชันมาก ก็จะชะลอความเร็วให้โดยอัตโนมัติ ด้วยระบบตรวจจับคุณลักษณ์ของพื้นผิว หรือเซอร์เฟศ ไอดี (SURFACE ID) และตรวจจับเส้นทาง 3 มิติ (3D PATH SENSING) ที่ทำงานด้วยเซนเซอร์ อุลทราโซนิค 2 ตัว หรือถ้าจะเรียกว่า “โซนาร์” ก็ไม่ผิดนัก (ต่างจากที่ใช้กับ นิสสัน เซฟีโร ในอดีต) โดยจะสแกนพื้นผิวด้านหน้าของรถ ทีมงานของ แลนด์ โรเวอร์ นั้นได้เดินทางไปทั่วโลกเพื่อเก็บข้อมูลจำนวนมหาศาลของพื้นผิวต่างๆ อาทิ โคลน ทราย กรวด และหิมะ เพื่อเป็นฐานข้อมูลให้รถอนาคตของตัวเอง โดยในระบบ ตรวจจับคุณลักษณะของพื้นผิว จะช่วยให้รถสามารถประเมินเส้นทางข้างหน้า และปรับระบบขับเคลื่อนให้ทันท่วงที แม้ว่าในขณะนี้ยังจะเป็นช่วงแรกของการพัฒนา แต่นี่ก็จะเป็นเส้นทางให้กับพาหนะขับขี่บนเส้นทางทุรกันดานแบบไร้คนขับในอนาคต รวมถึงอาจนำไปใช้เพื่อการทหารก็เป็นไปได้เช่นกัน
นอกจากเทคโนโลยีด้านการสื่อสารระหว่างยานพาหนะ และระบบตรวจสอบเส้นทางด้านหน้าของค่าย แจกวาร์ แลนด์ โรเวอร์ แล้วยังมีอีกเทคโนโลยี ที่จะมีผลกระทบอย่างยิ่งในการพัฒนายานยนต์ไร้คนขับ นั่นคือ การพัฒนา “การตอบโต้” ระหว่างสมองกลกับมนุษย์
เทคโนโลยี DSRC ยังสามารถนำมาใช้เพื่อ “ร่น” ระยะเวลาการตัดสินใจของผู้ขับขี่ ขณะขับรถต่อกันเป็นขบวน ในรูปแบบของ COOPERATIVE-ADAPTIVE CRUISE CONTROL (CACC) หรือระบบครูสคอนทโรลแบบร่วมมือกัน โดยรถยนต์ซึ่งขับต่อกันเป็นขบวนในลักษณะคอนวอย (CONVOY) หรือ พลาทูนิง (PLATOONING) จะมีการสื่อสารไร้สายไปยังรถคันนำ รูปแบบการเคลื่อนที่ของรถคันที่นำจะส่งผลทันทีกับรถคันที่ตามในขบวน อาทิ เมื่อเบรคกะทันหัน รถคันต่อมาก็จะเบรคทันทีด้วยน้ำหนักเบรคที่เท่ากันในเวลาเพียงเสี้ยววินาที ซึ่งเมื่อเทียบกับเทคโนโลยีเซนเซอร์กล้อง หรือเรดาร์ในปัจจุบัน ที่มีการหน่วงเวลาเล็กน้อย ระบบ DSRC นี้จะทำงานได้เร็วกว่ามาก
ด้วยเทคโนโลยีนี้ รถยนต์ที่วิ่งตามกันบนทางหลวงจะสามารถวิ่งชิดเข้าหากันได้ใกล้มากขึ้น หากเทียบกับเทคโนโลยีปัจจุบันที่ใช้เรดาร์ จะต้องทิ้งห่างกับคันหน้าถึง 2-3 ช่วงคันรถ ซึ่งเป็นสาเหตุให้รถคันอื่น “แทรก” เข้ามาได้ง่าย ทำให้เกิดอันตรายได้ แม้เทคโนโลยีนี้จะทำให้รถวิ่งใกล้กันจนน่ากลัว แต่เชื่อเถอะ ว่า หลังจากที่ใช้ไปซักระยะหนึ่ง เราจะมั่นใจไปเองว่า มันทำงานได้เร็วกว่ามนุษย์อย่างแน่นอน
และที่เหนือไปกว่านั้น คือ การพัฒนาเทคโนโลยี DSRC ขับเคลื่อนอัตโนมัติสำหรับการวิ่งนอกเส้นทางถนน (OFF-ROAD) ในระบบนี้เราจะไม่มีสาธารณูปโภครอบตัวให้อ้างอิง ดังนั้นรถยนต์จะใช้การสื่อสารระหว่างรถกับรถด้วยกันเป็นหลัก
แนวคิดจะเหมือนกับการขับบนทางหลวง โดยรถที่วิ่งในขบวนจะทำทุกอย่างเหมือนกับรถคันนำหน้าในเวลาที่เหมาะสม ข้อมูลจากคันหน้าจะถูกส่งไปยังรถคันต่อๆ มา ไม่ว่าจะเป็น องศาของพวงมาลัย การใช้คันเร่ง การทำงานของระบบรองรับ รวมถึงลักษณะของการเบรค เพื่อที่จะได้ปรับตัวรถได้ทันท่วงทีกับสภาพพื้นดินข้างหน้า
และถึงจะไม่มีรถนำทาง แต่ แลนด์ โรเวอร์ ที่ติดตั้งระบบเซนเซอร์ทันสมัย ก็ยังสามารถวิเคราะห์สภาพถนนล่วงหน้าได้ หากเส้นทางด้านหน้าดูแล้วมีความชันมาก ก็จะชะลอความเร็วให้โดยอัตโนมัติ ด้วยระบบตรวจจับคุณลักษณ์ของพื้นผิว หรือเซอร์เฟศ ไอดี (SURFACE ID) และตรวจจับเส้นทาง 3 มิติ (3D PATH SENSING) ที่ทำงานด้วยเซนเซอร์ อุลทราโซนิค 2 ตัว หรือถ้าจะเรียกว่า “โซนาร์” ก็ไม่ผิดนัก (ต่างจากที่ใช้กับ นิสสัน เซฟีโร ในอดีต) โดยจะสแกนพื้นผิวด้านหน้าของรถ ทีมงานของ แลนด์ โรเวอร์ นั้นได้เดินทางไปทั่วโลกเพื่อเก็บข้อมูลจำนวนมหาศาลของพื้นผิวต่างๆ อาทิ โคลน ทราย กรวด และหิมะ เพื่อเป็นฐานข้อมูลให้รถอนาคตของตัวเอง โดยในระบบ ตรวจจับคุณลักษณะของพื้นผิว จะช่วยให้รถสามารถประเมินเส้นทางข้างหน้า และปรับระบบขับเคลื่อนให้ทันท่วงที แม้ว่าในขณะนี้ยังจะเป็นช่วงแรกของการพัฒนา แต่นี่ก็จะเป็นเส้นทางให้กับพาหนะขับขี่บนเส้นทางทุรกันดานแบบไร้คนขับในอนาคต รวมถึงอาจนำไปใช้เพื่อการทหารก็เป็นไปได้เช่นกัน
นอกจากเทคโนโลยีด้านการสื่อสารระหว่างยานพาหนะ และระบบตรวจสอบเส้นทางด้านหน้าของค่าย แจกวาร์ แลนด์ โรเวอร์ แล้วยังมีอีกเทคโนโลยี ที่จะมีผลกระทบอย่างยิ่งในการพัฒนายานยนต์ไร้คนขับ นั่นคือ การพัฒนา “การตอบโต้” ระหว่างสมองกลกับมนุษย์
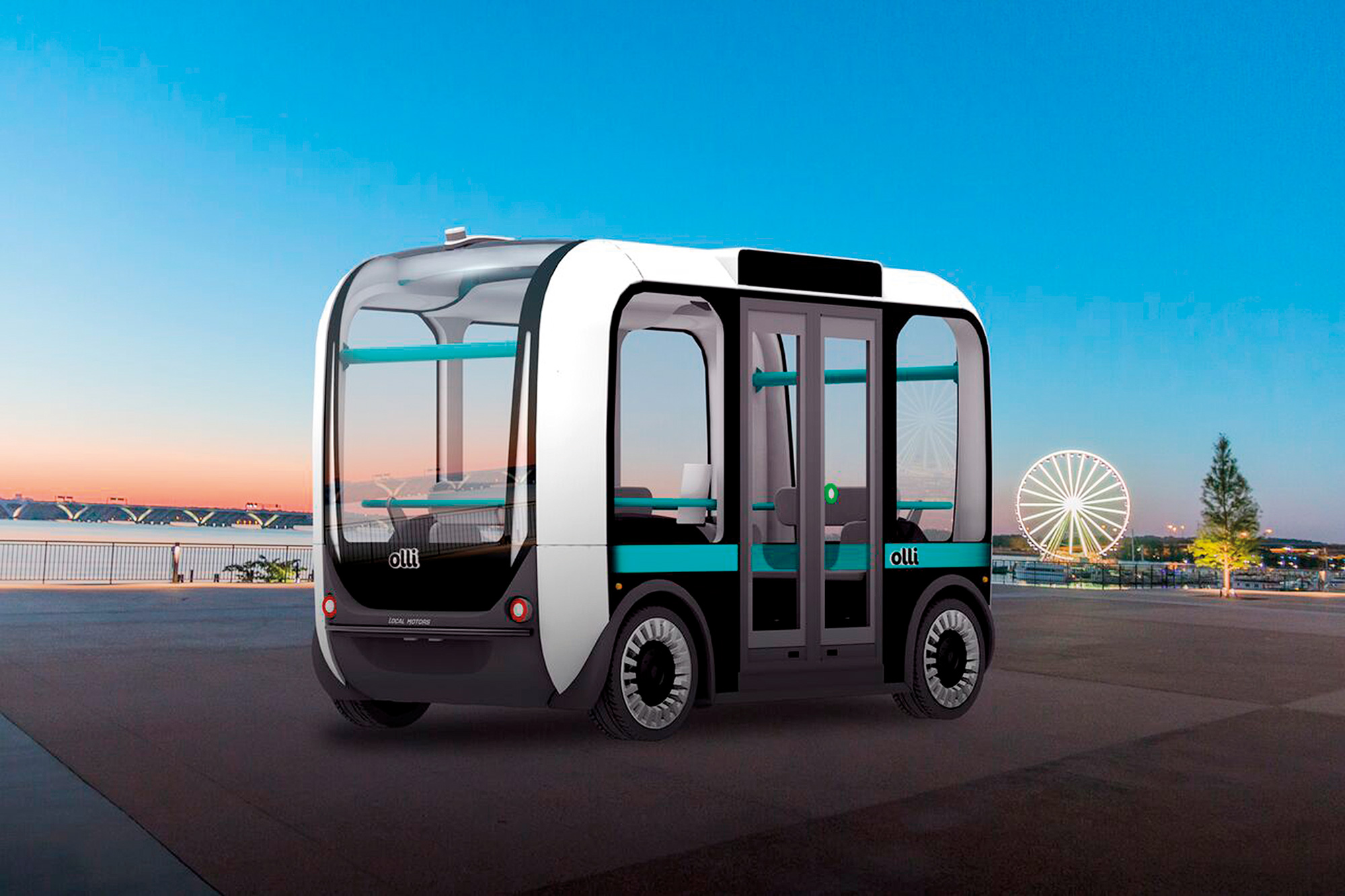 ผู้นำด้านนี้ คือ ไอบีเอม ฮอนดา และ ซอฟท์แบงค์ บริษัทชั้นนำด้านโทรคมนาคมไร้สายของญี่ปุ่น โดย ไอบีเอม เป็นเจ้าของพแลทฟอร์ม “วัทสัน” (WATSON) ซึ่งไม่ใช่ร้านขายของ แต่เป็นระบบเทคโนโลยีที่สามารถเข้าใจบทสนทนาของมนุษย์ได้ โดยที่ไม่จำกัดว่า ต้องเป็นเพียงคำสั้นๆ ง่ายๆ เรียกว่าเป็น “ขั้นกว่า” ของ SIRI จากค่ายแอพเพิลนั่นเอง โดยในขั้นต้นนี้ระบบวัทสันได้ทดลองติดตั้งบนยานยนต์ทดลอง “ออลลี” (OLLI) ซึ่งเป็นรถโดยสารไร้คนขับ 12 ที่นั่ง ผลิตโดยบริษัทรถยนต์อเมริกัน “โลคอล มอเตอร์ส” (LOCAL MOTORS) โดยทำงานด้วยการเชื่อมต่อ 4 คุณลักษณ์ ได้แก่
1. ระบบแปลงเสียงให้เป็นข้อความ (SPEECH TO TEXT RECOGNITION)
2. ระบบแจกแจงภาษาแบบธรรมชาติ (NATURAL LANGUAGE CLASSIFIER)
3. ระบบจับสาระของข้อความ (ENTITY EXTRACTION)
4. ระบบแปลงข้อความเป็นเสียง (TEXT TO SPEECH)
ทั้งหมดนี้ใช้การคำนวณผ่านระบบคลาวด์ ทำให้พาหนะที่ติดตั้งระบบวัทสัน สามารถตอบสนองกับความต้องการของผู้โดยสารได้อย่างรวดเร็วและเป็นธรรมชาติ เหมือนเสียงของ K.I.I.T รถยนต์คอมพิวเตอร์ KNIGHT 2000 จากซีรีส์ในยุค 80 เรื่อง อัศวินคอมพิวเตอร์ แสดงโดยพ่อกล้ามใหญ่ เดวิด แฮซเซลฮอฟฟ์ (DAVID HASSELHOFF) ก็เป็นไปได้ (ที่แน่ๆ น่าจะคุยแล้วฟังรู้เรื่องมากกว่าเสียง กุ๊ก กุ๊ก กู๋ ของ หุ่นกระป๋อง R2D2 ใน สตาร์วอร์ส) ใครที่อยากรู้ว่ามันทำงานได้ดีเพียงไร คงต้องไปทดลองที่วอชิงทัน ดีซี หรือในปลายปีนี้ที่ ลาสเวกัส ที่เจ้ารถ ออลลี ทดลองใช้งานอยู่ และมีข่าวลือกันว่า มันสามารถแนะนำร้านอาหารอร่อยๆ ให้คุณได้สบาย และเผลอๆ อาจจะเล่าเรื่อง ขำๆ ของผู้โดยสารคนก่อนหน้านั้นให้คุณฟังได้อีกด้วย
ผู้นำด้านนี้ คือ ไอบีเอม ฮอนดา และ ซอฟท์แบงค์ บริษัทชั้นนำด้านโทรคมนาคมไร้สายของญี่ปุ่น โดย ไอบีเอม เป็นเจ้าของพแลทฟอร์ม “วัทสัน” (WATSON) ซึ่งไม่ใช่ร้านขายของ แต่เป็นระบบเทคโนโลยีที่สามารถเข้าใจบทสนทนาของมนุษย์ได้ โดยที่ไม่จำกัดว่า ต้องเป็นเพียงคำสั้นๆ ง่ายๆ เรียกว่าเป็น “ขั้นกว่า” ของ SIRI จากค่ายแอพเพิลนั่นเอง โดยในขั้นต้นนี้ระบบวัทสันได้ทดลองติดตั้งบนยานยนต์ทดลอง “ออลลี” (OLLI) ซึ่งเป็นรถโดยสารไร้คนขับ 12 ที่นั่ง ผลิตโดยบริษัทรถยนต์อเมริกัน “โลคอล มอเตอร์ส” (LOCAL MOTORS) โดยทำงานด้วยการเชื่อมต่อ 4 คุณลักษณ์ ได้แก่
1. ระบบแปลงเสียงให้เป็นข้อความ (SPEECH TO TEXT RECOGNITION)
2. ระบบแจกแจงภาษาแบบธรรมชาติ (NATURAL LANGUAGE CLASSIFIER)
3. ระบบจับสาระของข้อความ (ENTITY EXTRACTION)
4. ระบบแปลงข้อความเป็นเสียง (TEXT TO SPEECH)
ทั้งหมดนี้ใช้การคำนวณผ่านระบบคลาวด์ ทำให้พาหนะที่ติดตั้งระบบวัทสัน สามารถตอบสนองกับความต้องการของผู้โดยสารได้อย่างรวดเร็วและเป็นธรรมชาติ เหมือนเสียงของ K.I.I.T รถยนต์คอมพิวเตอร์ KNIGHT 2000 จากซีรีส์ในยุค 80 เรื่อง อัศวินคอมพิวเตอร์ แสดงโดยพ่อกล้ามใหญ่ เดวิด แฮซเซลฮอฟฟ์ (DAVID HASSELHOFF) ก็เป็นไปได้ (ที่แน่ๆ น่าจะคุยแล้วฟังรู้เรื่องมากกว่าเสียง กุ๊ก กุ๊ก กู๋ ของ หุ่นกระป๋อง R2D2 ใน สตาร์วอร์ส) ใครที่อยากรู้ว่ามันทำงานได้ดีเพียงไร คงต้องไปทดลองที่วอชิงทัน ดีซี หรือในปลายปีนี้ที่ ลาสเวกัส ที่เจ้ารถ ออลลี ทดลองใช้งานอยู่ และมีข่าวลือกันว่า มันสามารถแนะนำร้านอาหารอร่อยๆ ให้คุณได้สบาย และเผลอๆ อาจจะเล่าเรื่อง ขำๆ ของผู้โดยสารคนก่อนหน้านั้นให้คุณฟังได้อีกด้วย
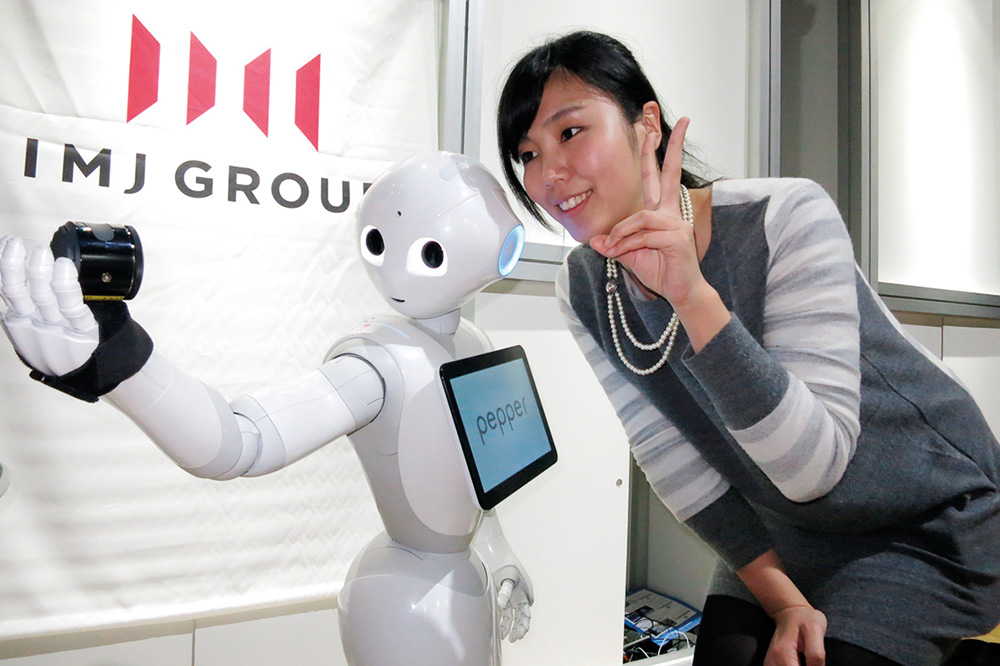 ส่วนเทคโนโลยีของ ฮอนดา และ ซอฟท์แบงค์ ถือเป็นอีกขั้นหนึ่ง เพราะนอกจากจะรับรู้ด้วยการสั่งงานผ่านเสียงคนแล้ว จากการพัฒนาหุ่นยนต์ ทางฝ่าย ฮอนดา คือ หุ่น อซิโม (ASIMO) และ ของค่ายซอฟท์แบงค์ คือ เพพเพอร์ (PEPPER) ทั้ง 2 ตัว ถือว่าเป็นปัญญาประดิษฐ์ (AI: ARTIFICIAL INTELLIGENT) ที่ก้าวหน้าที่สุดคู่หนึ่งในปัจจุบัน สิ่งที่เหนือกว่าของหุ่นทั้ง 2 ตัว คือ การประเมินสภาพรอบตัวด้วยสีหน้า ท่าทาง และอารมณ์ของมนุษย์
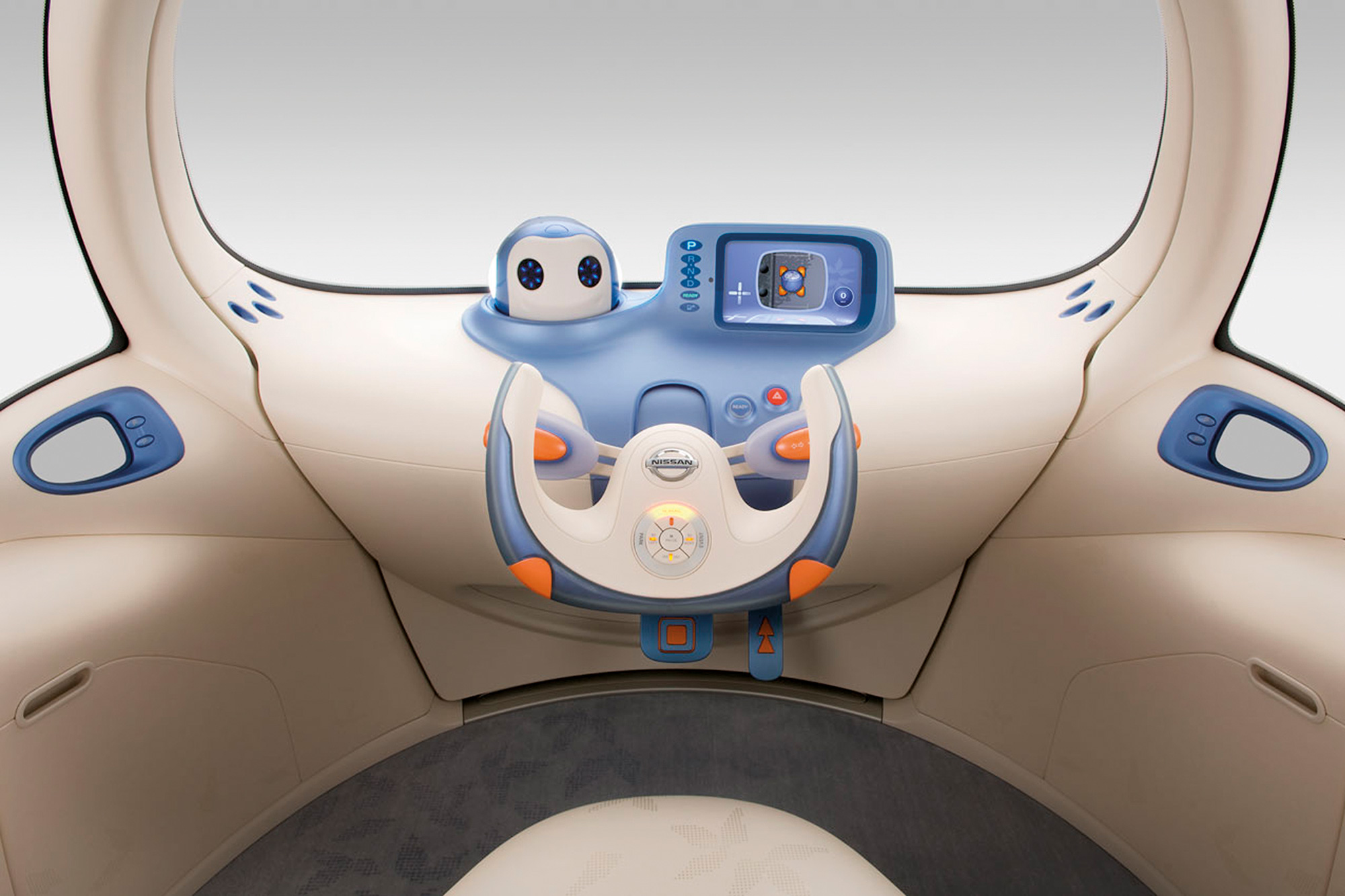
เราเคยเห็นรถยนต์แนวคิดที่ติดตั้งหุ่นยนต์ที่จะพูดคุยกับเรามาบ้างแล้ว อาทิ นิสสัน ปีโว 2 (NISSAN PIVO 2) นับเป็นหนึ่งในไอเดียล้ำสมัยที่แสดงให้เห็นว่าคอมพิวเตอร์ หรือซูเพอร์คอมพิวเตอร์ของรถในอนาคต นอกจากจะใช้ในการมองไปรอบๆ ตัวรถ และพาเราไปถึงที่หมายอย่างปลอดภัยแล้ว ยังจะมีส่วนในการดูแลสารทุกข์สุกดิบของเราได้อีกด้วย
ดังนั้น เราคงต้องจับตาดูว่า ค่ายรถยนต์น้องใหม่ “แอพเพิล” จะมีเทคโนโลยีอะไรชอคโลกบ้างไหม ? แต่แหล่งข่าวให้ข้อมูลมาแล้วว่า มีการเสาะหาสถานที่ทดสอบในย่านซานฟรานซิสโก เพราะทุกวันนี้ยังคงไม่ปริปากว่าจะมีอะไรมาโชว์บ้าง นอกจากบอกว่าจะเปิดตัวในปี 2021 ซึ่งในตอนนั้นเทคโนโลยีที่เขียนมาในวันนี้น่าจะสุกงอมได้ที่ และด้วยชื่อชั้นระดับของบแรนด์ที่วางตัวในชั้น “พรีเมียม” แล้วเชื่อว่า “ต้องไม่ธรรมดา”
นอกจากนั้นการที่ ซีอีโอ ทิม คุค (TIM COOK) ได้ไปเยี่ยมเยือนสายการผลิตของรถไฟฟ้ารุ่น ไอ 3 ของ บีเอมดับเบิลยู ในเดือนกรกฎาคมที่ผ่านมา ก็อาจเป็นไปได้ว่า รถยนต์ของ แอพเพิล นั้น “อาจ” จะมีพื้นฐานร่วมกับ บีเอมดับเบิลยู ไอ 3 และข่าวการเข้าร่วมงานของ เปา เฟร์เกล (PAUL FURGALE) นักวิจัยอาวุโสด้านยานยนต์ไร้คนขับจากยุโรป รวมทั้ง เจมี คาร์ลสัน (JAMIE CARLSON) วิศวกรอาวุโสจาก เทสลา ทำให้เรื่องราวของรถยนต์จาก แอพเพิล ดูน่าตื่นเต้นยิ่งขึ้นไปอีก
แม้จะเริ่มเรื่องด้วย ข่าวอันน่าสลดใจของอุบัติเหตุ แต่ประวัติศาสตร์ได้สอนเราว่า อย่ากังวลใจกับข่าวร้าย เพราะมันคือข้อมูลชั้นดี สำหรับการก้าวต่อไปอย่างมั่นคงในอนาคต
ส่วนเทคโนโลยีของ ฮอนดา และ ซอฟท์แบงค์ ถือเป็นอีกขั้นหนึ่ง เพราะนอกจากจะรับรู้ด้วยการสั่งงานผ่านเสียงคนแล้ว จากการพัฒนาหุ่นยนต์ ทางฝ่าย ฮอนดา คือ หุ่น อซิโม (ASIMO) และ ของค่ายซอฟท์แบงค์ คือ เพพเพอร์ (PEPPER) ทั้ง 2 ตัว ถือว่าเป็นปัญญาประดิษฐ์ (AI: ARTIFICIAL INTELLIGENT) ที่ก้าวหน้าที่สุดคู่หนึ่งในปัจจุบัน สิ่งที่เหนือกว่าของหุ่นทั้ง 2 ตัว คือ การประเมินสภาพรอบตัวด้วยสีหน้า ท่าทาง และอารมณ์ของมนุษย์
เราเคยเห็นรถยนต์แนวคิดที่ติดตั้งหุ่นยนต์ที่จะพูดคุยกับเรามาบ้างแล้ว อาทิ นิสสัน ปีโว 2 (NISSAN PIVO 2) นับเป็นหนึ่งในไอเดียล้ำสมัยที่แสดงให้เห็นว่าคอมพิวเตอร์ หรือซูเพอร์คอมพิวเตอร์ของรถในอนาคต นอกจากจะใช้ในการมองไปรอบๆ ตัวรถ และพาเราไปถึงที่หมายอย่างปลอดภัยแล้ว ยังจะมีส่วนในการดูแลสารทุกข์สุกดิบของเราได้อีกด้วย
ดังนั้น เราคงต้องจับตาดูว่า ค่ายรถยนต์น้องใหม่ “แอพเพิล” จะมีเทคโนโลยีอะไรชอคโลกบ้างไหม ? แต่แหล่งข่าวให้ข้อมูลมาแล้วว่า มีการเสาะหาสถานที่ทดสอบในย่านซานฟรานซิสโก เพราะทุกวันนี้ยังคงไม่ปริปากว่าจะมีอะไรมาโชว์บ้าง นอกจากบอกว่าจะเปิดตัวในปี 2021 ซึ่งในตอนนั้นเทคโนโลยีที่เขียนมาในวันนี้น่าจะสุกงอมได้ที่ และด้วยชื่อชั้นระดับของบแรนด์ที่วางตัวในชั้น “พรีเมียม” แล้วเชื่อว่า “ต้องไม่ธรรมดา”
นอกจากนั้นการที่ ซีอีโอ ทิม คุค (TIM COOK) ได้ไปเยี่ยมเยือนสายการผลิตของรถไฟฟ้ารุ่น ไอ 3 ของ บีเอมดับเบิลยู ในเดือนกรกฎาคมที่ผ่านมา ก็อาจเป็นไปได้ว่า รถยนต์ของ แอพเพิล นั้น “อาจ” จะมีพื้นฐานร่วมกับ บีเอมดับเบิลยู ไอ 3 และข่าวการเข้าร่วมงานของ เปา เฟร์เกล (PAUL FURGALE) นักวิจัยอาวุโสด้านยานยนต์ไร้คนขับจากยุโรป รวมทั้ง เจมี คาร์ลสัน (JAMIE CARLSON) วิศวกรอาวุโสจาก เทสลา ทำให้เรื่องราวของรถยนต์จาก แอพเพิล ดูน่าตื่นเต้นยิ่งขึ้นไปอีก
แม้จะเริ่มเรื่องด้วย ข่าวอันน่าสลดใจของอุบัติเหตุ แต่ประวัติศาสตร์ได้สอนเราว่า อย่ากังวลใจกับข่าวร้าย เพราะมันคือข้อมูลชั้นดี สำหรับการก้าวต่อไปอย่างมั่นคงในอนาคต เรื่องโดย : ภัทรกิติ์ โกมลกิติ
นิตยสาร 399 ฉบับเดือน ตุลาคม ปี 2559
คอลัมน์ Online : รู้ลึกเรื่องรถ
ลิงค์สำหรับแชร์ : https://autoinfo.co.th/article/136016
แชร์บทความ

